Opgemeten parameters
Bij de metingen kun je de volgende parameters analyseren:
- Dynamische bewegingen: korte houdingsveranderingen waarbij binnen vier seconden een drempelwaarde wordt overschreden en vervolgens weer onder die drempel wordt teruggekeerd.
- Statische houdingen: houdingen die langer dan vier seconden worden aangehouden, conform de norm EN 1005-4 ‘Houdingen’.
De classificatie van bewegingen en houdingen is gebaseerd op de ingestelde drempelwaarden voor alfa en beta:
- Alfa = rompkanteling: de graad van voorover- of achteroverbuigen van de romp t.o.v. de neutraalhouding.
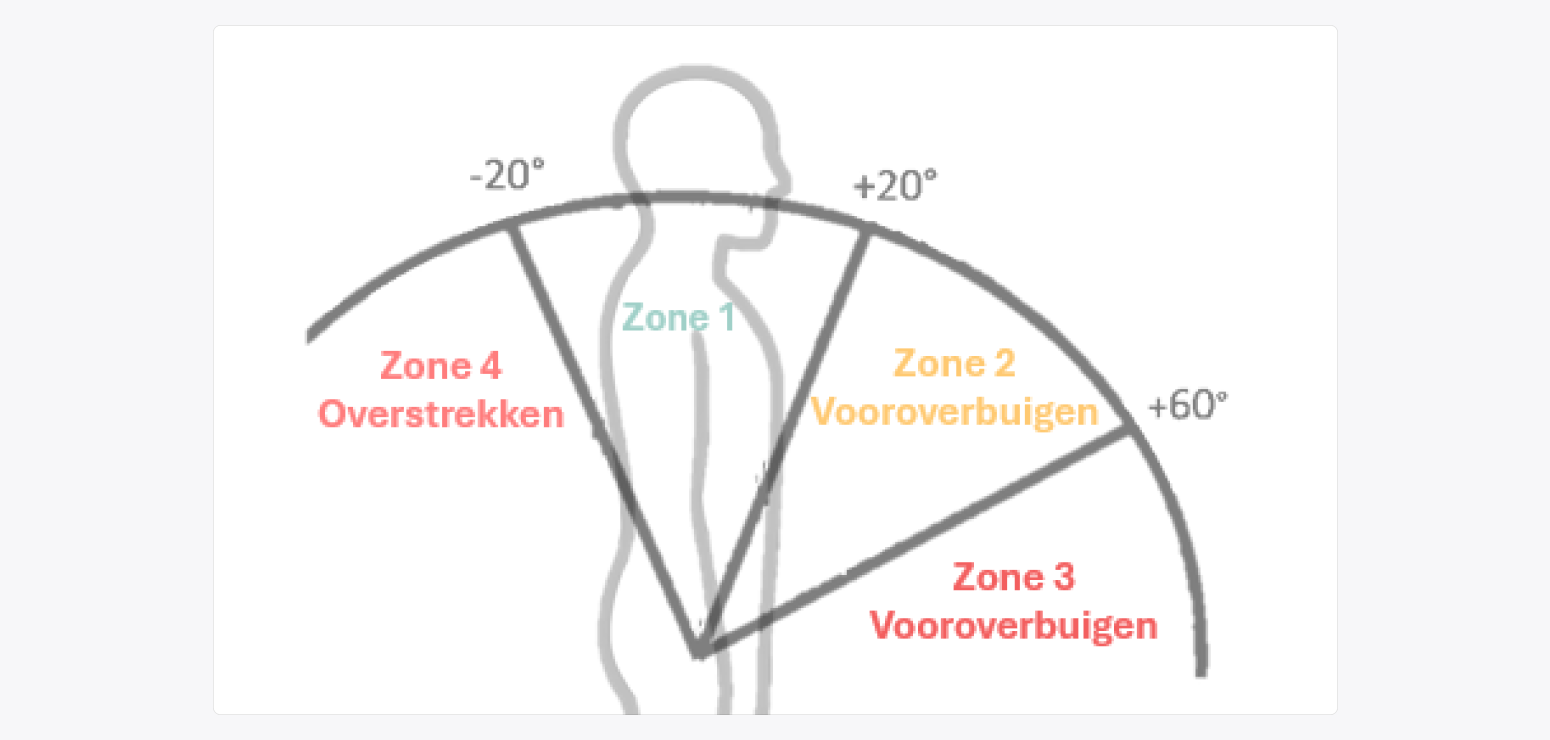
Zone-indeling voor α (rompkanteling):
- Zone 1: −20° tot +20°
- Zone 2: +20° tot +60°
- Zone 3: > +60°
- Zone 4: < −20°
Voor Zone 1 en Zone 4 gebruiken we aangepaste grenswaarden. Een drempel van 0° (gedefinieerd door de EN 1005-4 ‘Houdingen’) zou in de praktijk te vaak foutmeldingen geven bij overstrekken. Daarom is de grens verschoven naar –20°, zodat de metingen realistischer zijn.
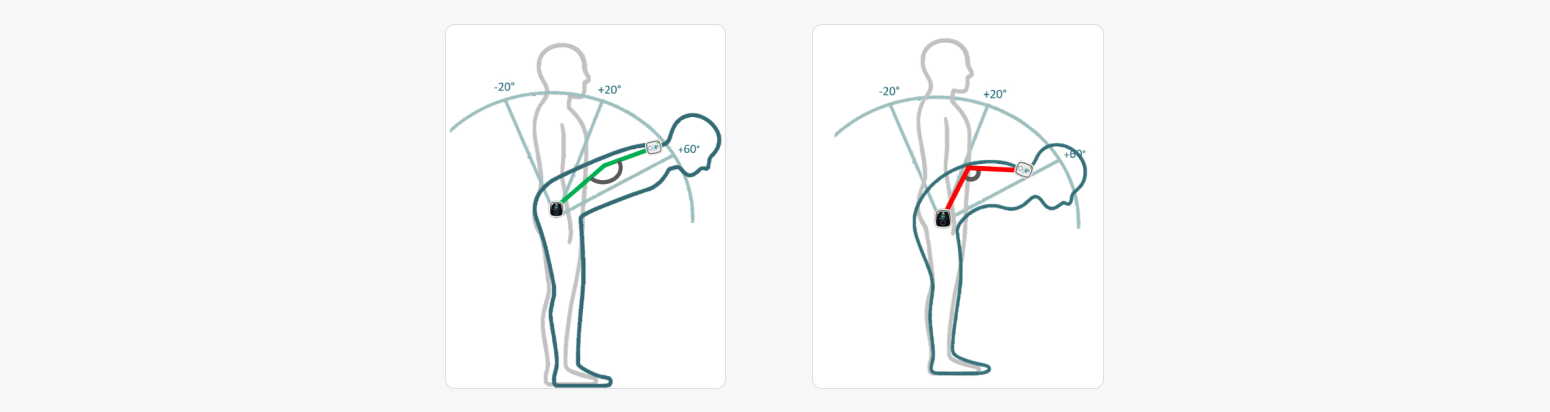
- Beta = rugkromming: de mate waarin de rug wordt geplooid (hol/bol gemaakt) t.o.v. de neutraalhouding.
⬇️ Voorbeeld: iemand buigt 60° naar voren met de romp (α).
- In de eerste situatie blijft β = 0°, omdat de rug recht blijft.
- In de tweede situatie wordt de rug wél geplooid (‘bolle rug’). Daardoor neemt β toe tot 45° t.o.v. de neutrale positie.
Dynamische bewegingen
Een dynamische beweging is een korte verandering van houding die binnen ≤ 4 s optreedt. Bewegingen worden gedetecteerd op basis van α (hoe ver je kantelt) en afhankelijk van de configuratie van β (hoe je die kanteling uitvoert).
Standaardconfiguratie
- Buigen (voorover): α ≥ 60° én β ≥ 45°
- Overstrekken (achterover): α ≤ −20° én β ≤ −20°
- Torsie: draaiing in de rug ≥25° op de tijdsschaal (x-as) van de grafiek, gebruik je CTRL + muiswiel omhoog of omlaag.
👉 Een voorbeeld: vooroverbuigen met gestrekte rug (squat, semi-squat, door de knieën) waarbij alfa > 60° maar beta < 45°, telt niet als risicobeweging en veroorzaakt géén trilsignaal.
Deze drempels kun je in de instellingen aanpassen. Bij bewegingen kan β dus wel of niet worden meegeteld standaard wel.
De wearables gebruiken een schommelingsmarge om te voorkomen dat kleine variaties rond een drempel onterecht als nieuwe bewegingen geteld worden. Dit betekent dat:
- Een beweging wordt gedetecteerd zodra de hoek groter wordt dan de triggerdrempel.
- Een nieuwe beweging wordt pas geregistreerd wanneer de hoek onder de resetdrempel zakt en daarna opnieuw boven de triggerdrempel stijgt.
Voorbeeld:
- Triggerdrempel: 60° (alfa)
- Resetdrempel: 50° (alfa)
- Een beweging in Zone 3 wordt geregistreerd zodra de alfa-hoek > 60°.
- Een nieuwe beweging volgt pas als de alfa-hoek < 50° zakt en daarna weer > 60° stijgt.
- Blijft de alfa-hoek boven 60° zonder terug te zakken, dan telt dit als één beweging.
Een overzicht van de opgemeten dynamische parameters:
Vooroverbuigen (buigen)
Normatief focust EN 1005-4 op rompkanteling (α). In onze standaardconfiguratie telt een buiging als risicobeweging wanneer α ≥ 60° én β ≥ 45°. Een diepe buiging met α ≥ 60° maar β < 45° (rechte rug, bv. squat of semi-squat) geldt niet als risicobeweging en triggert geen trilsignaal.
Achteroverbuigen (overstrekken)
Omdat α < 0° in de praktijk te veel vals-positieven geeft, hanteren we een verschoven grens. In de standaardconfiguratie registreren we een risicobeweging bij α ≤ −20° in combinatie met β ≤ −20°.
Draaibewegingen in de rug
We registreren een torsie wanneer de romp t.o.v. het bekken ≥ 25° roteert, weg van neutraal en daarna terug naar neutraal. De norm EN 1005-4 hanteert 10°, maar in real-life metingen geeft dat veel vals-positieven (natuurlijke rompzwaai, kleine richtingscorrecties...). Daarom registreren wij torsie pas vanaf 25°: zo filteren we ruis en blijven alleen ergonomisch relevante draaibewegingen over.
Squat-/hurkbewegingen
Squats worden gedetecteerd via ons (vertrouwelijk) model. We rapporteren daarnaast het squat-percentage t.o.v. (squats + buigingen): hoe hoger dit percentage, hoe meer beengebruik (betere techniek). Hurken wordt niet apart van squats gerapporteerd. Merk je een situatie waarin het model minder goed presteert, laat het ons weten - die feedback helpt ons verbeteren.
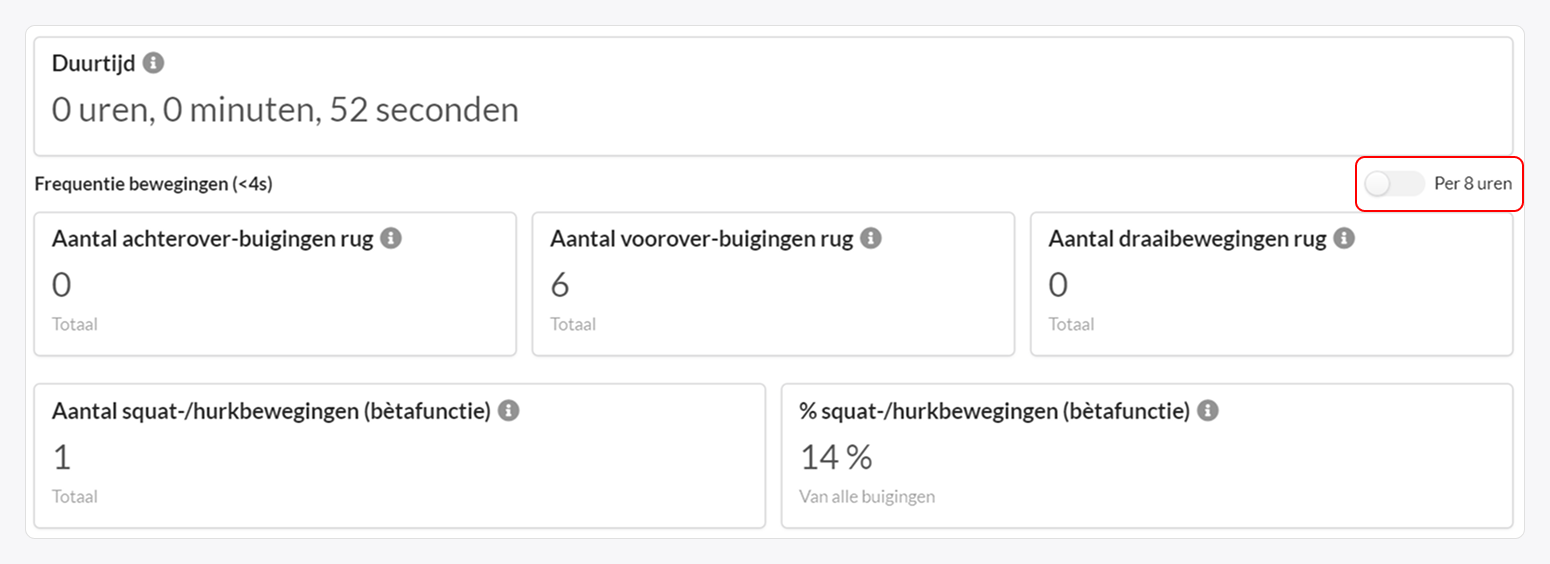
Standaard worden de totale bewegingen weergegeven, maar je kunt er ook voor kiezen om de bewegingen per 8 uur te bekijken:
Statische houdingen
Statische houdingen worden altijd en uitsluitend bepaald op basis van alfa (α). De rompkanteling t.o.v. neutraal. Beta (β) telt nooit mee bij statische houdingen en kan niet via de instellingen worden geactiveerd of aangepast. Ook de tijdsbalk/duurverdeling is volledig α-gebaseerd en blijft onbeïnvloed door wearable-instellingen.
We spreken van een statische houding wanneer een hoek langer dan 4 seconden wordt aangehouden (conform EN 1005-4). Voor α hanteren we dezelfde vaste zones: Zone 1 −20° tot +20°, Zone 2 +20° tot +60°, Zone 3 > +60°, Zone 4 < −20° (de −20°-grens vermijdt foutieve overstrekdetecties).
Bij statische houdingen wordt er geen rekening gehouden met de schommelingsmarge.
De dynamische parameters die worden opgemeten zijn:
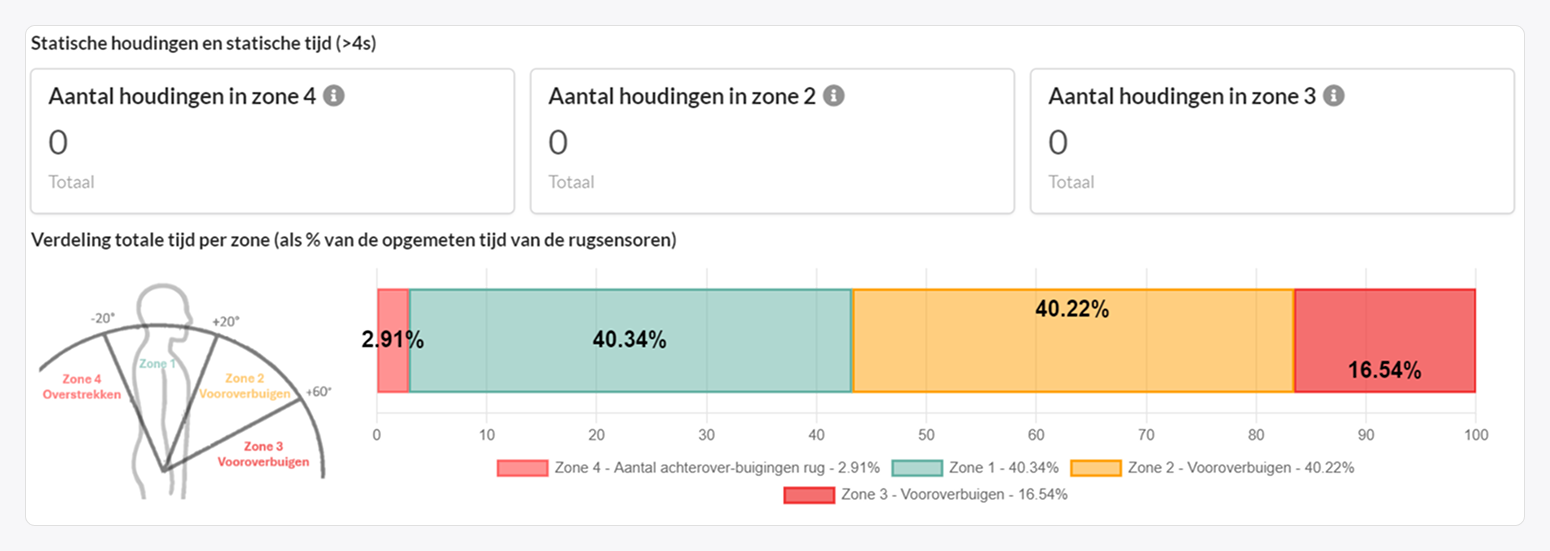
De statische houdingen die worden geregistreerd zijn:
- Het aantal houdingen in Zone 4 (overstrekken).
- Het aantal houdingen in Zone 2 (vooroverbuigen).
- Het aantal houdingen in Zone 3 (vooroverbuigen).
- De procentuele tijd in de verschillende zones t.o.v. de totale meetduur.
Trilsignalen bij risico
Wanneer een risicobeweging of -houding wordt gedetecteerd, ontvangt de gebruiker een trilsignaal (indien deze functie aan staat):
- Risicobeweging (buigen of overstrekken): sterk, kort trilsignaal.
- Voorovergebogen risicohouding: subtiel, aanhoudend trilsignaal dat stopt zodra je terug in zone 1 komt.